
Có thể từ trước các Bạn sử dụng Inventor đều nói là mô phỏng động học bằng driver constrain nhưng điều đó không phải là mô phỏng động học,. Đó chỉ là sự điều khiển ràng buộc. Tức là bạn điều khiển cái ràng buộc từ điều kiện này sang điều kiện khác. Những ràng buộc cứ thể biến đổi theo. Đó là ý kiến chủ quan của Bản thân mình có thể đúng. Cũng có thể sai. Mong các bạn cho ý kiến.
Đa số mọi người đều sử dụng Dynamic Design motion giống cosmos motion của Solidwork.Trc mình cũng đã nhìn qua giao diện của nó và đọc tài liệu của Cosmos motion.
Hôm nay mình muốn giới thiệu tới các bạn một công cụ có sẵn trong Inventor . Không phải là add-on. Dynamic Simulation : Ngay cái tên cũng đã nói lên nó là mô phỏng động học trên inventor. Dynamic Simulation là mô phỏng dựa trên số bậc tự do của cơ cấu. Căn cứ vào số bậc tự do mà dynamic có thể mô phỏng các cơ cấu nào. Có thể mô phỏng chuyển động theo một quỹ đạo cho trước. Dynamic Simulation chuyển động nhờ các khớp. Nó định nghĩa các khớp giống như trong môn nguyên lý máy.
Nó có thể biến các ràng buộc trên môi trường Assembly thành các khớp. Có thể chuyển đổi một cách tự động hoặc là bằng tay ( Convert).
Hoặc là chính bản thân chúng ta tạo các khớp ( Insert Joint).
Các Bước của mô phỏng bằng Dynamic Simulation :
1)Tạo một Assembly với đầy đủ các thành phần của cơ cấu. Có thể lắp ráp lại với nhau hoặc ko cần lắp ghép cũng được.
2)Tiến hành tạo khớp :
-Tạo khớp tự động hoặc Convert Joint với các bản Assembly đã lắp ráp các chi tiết lại với nhau.tạo ra các khớp tương đối với nhau. Có một số Mate sang Dynamic Simulation ko sử dụng được đó là mate góc và các mate motion.
-Tiến hành Insert Joint với các bản Assembly chưa lắp ráp với nhau và các chi tiết chuyển động tương đối trong Dynami Simulation gọi là khớp không tiêu chuẩn.
3)Tiến hành tạo các điều kiện của chuyển động như là vận tốc, gia tốc, lực , momen…
4)Chạy mô phỏng động và xuất kết quả của mô phỏng. Bao gồm vận tốc, gia tốc, lực, ứng suất.
Do chưa sử dụng Dynamic simulation lắm nên mình chỉ dám đưa ra như vậy thôi. Dưới đây là một ví dụ mà mình làm được mong các bạn xem nhé.
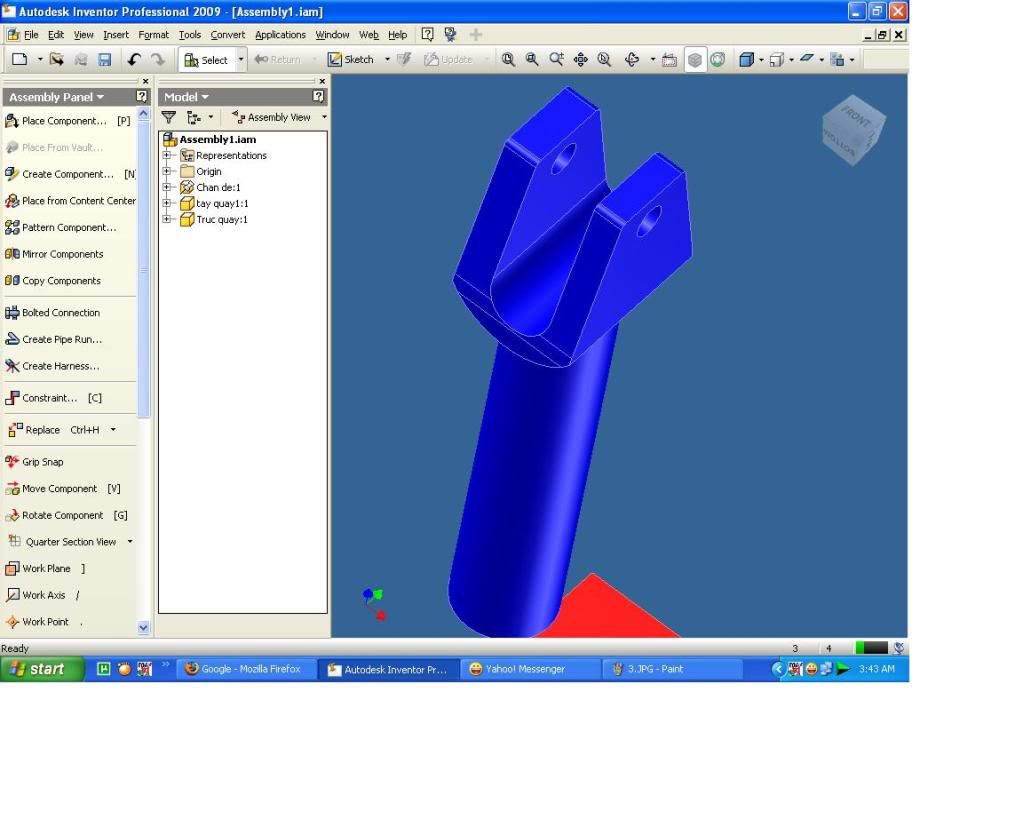
Giả sử mình có một bản vẽ như thế này.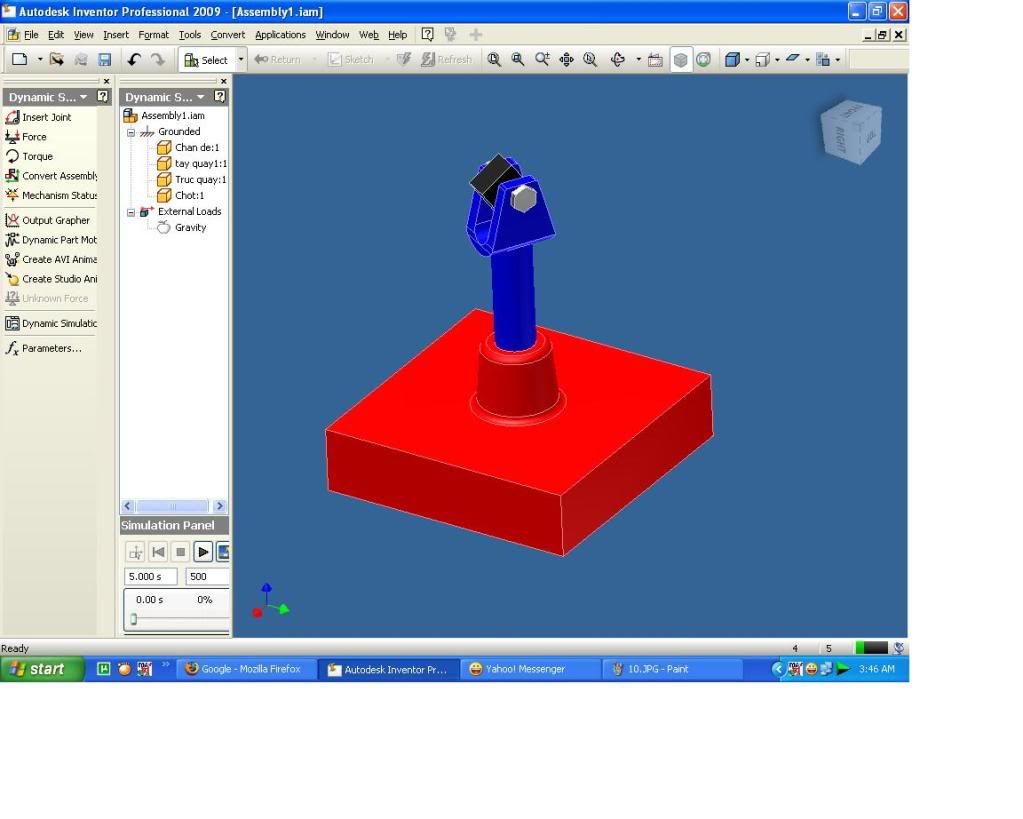
Để thuận tiện cho các bạn mình sẽ làm lại quá trình lắp ráp các chi tiết.
Đầu tiên mình tạo một Assembly mới
sau đó lấy lần lượt các chi tiết sau vào.
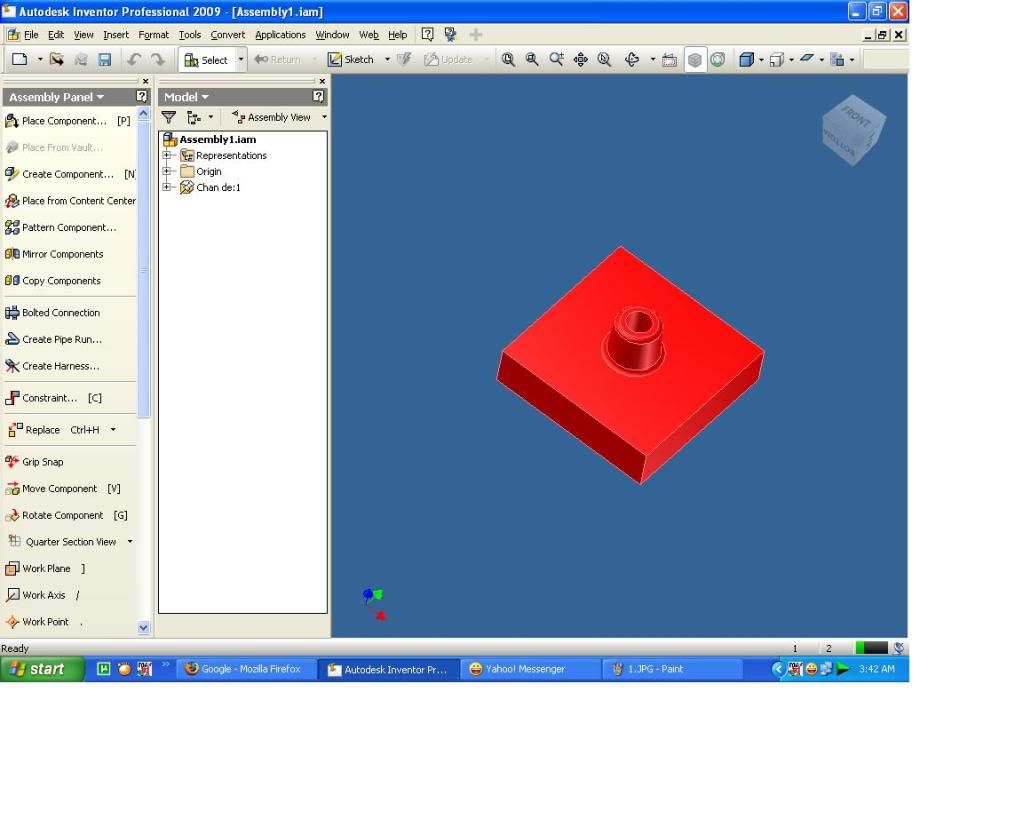
Chân đế.
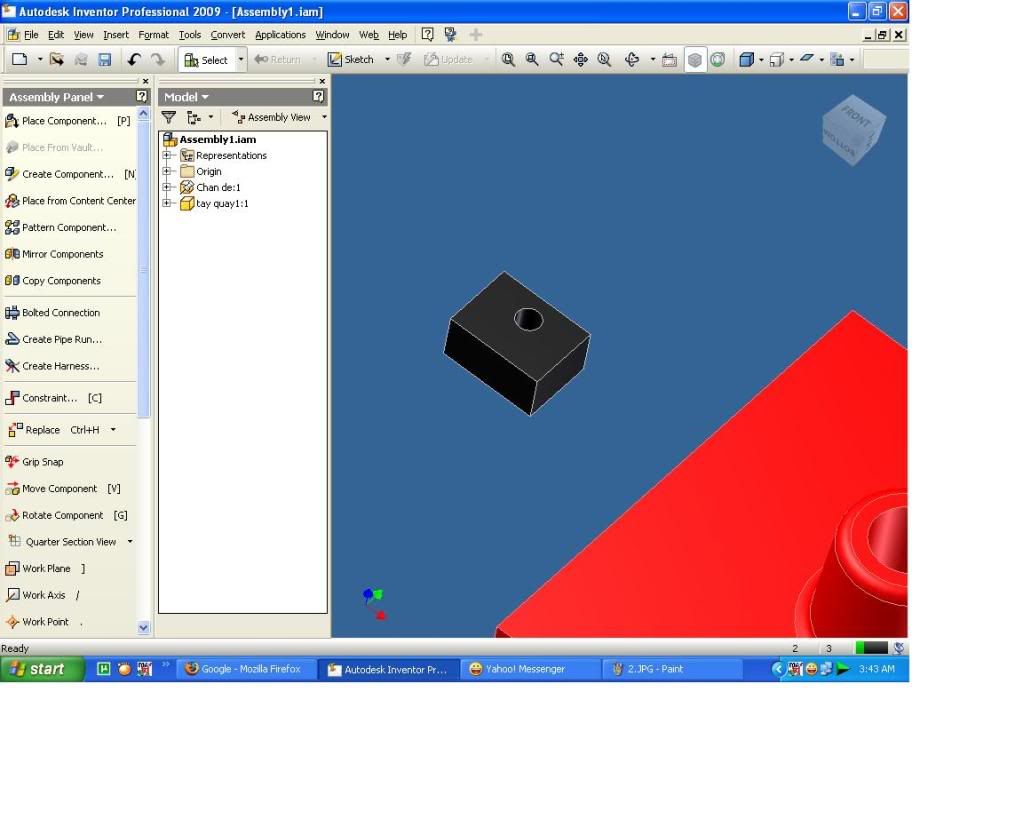
Tay quay:
Trục Quay:
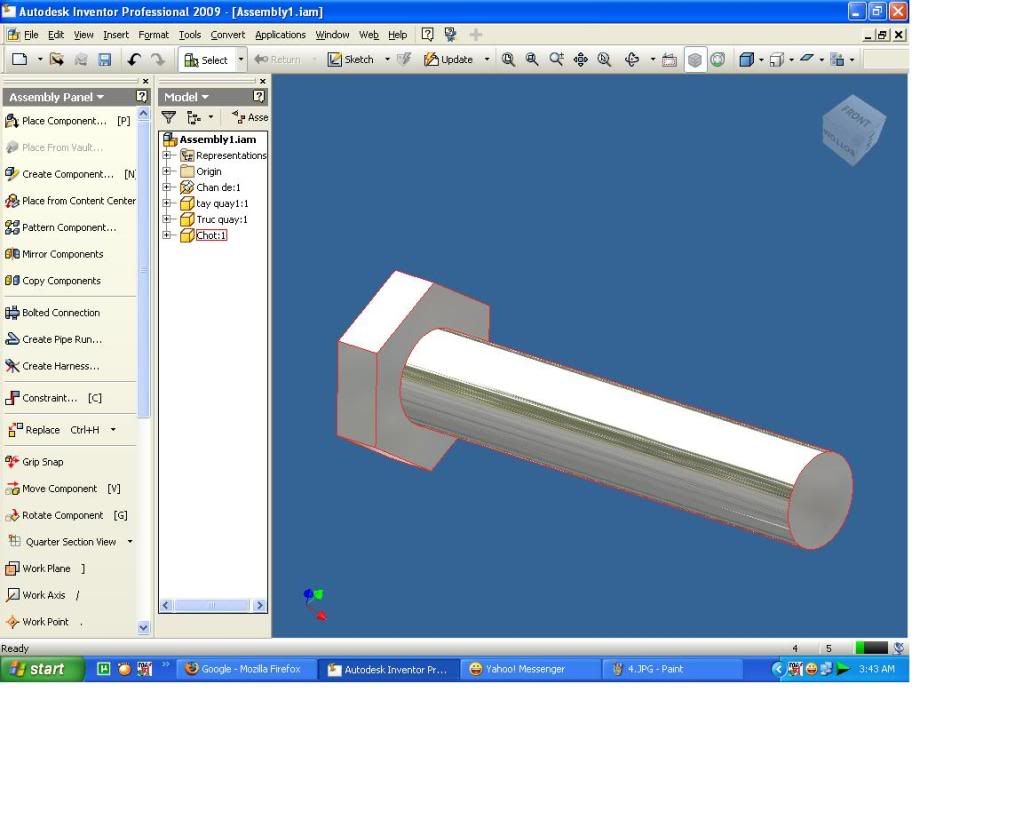
Chốt:
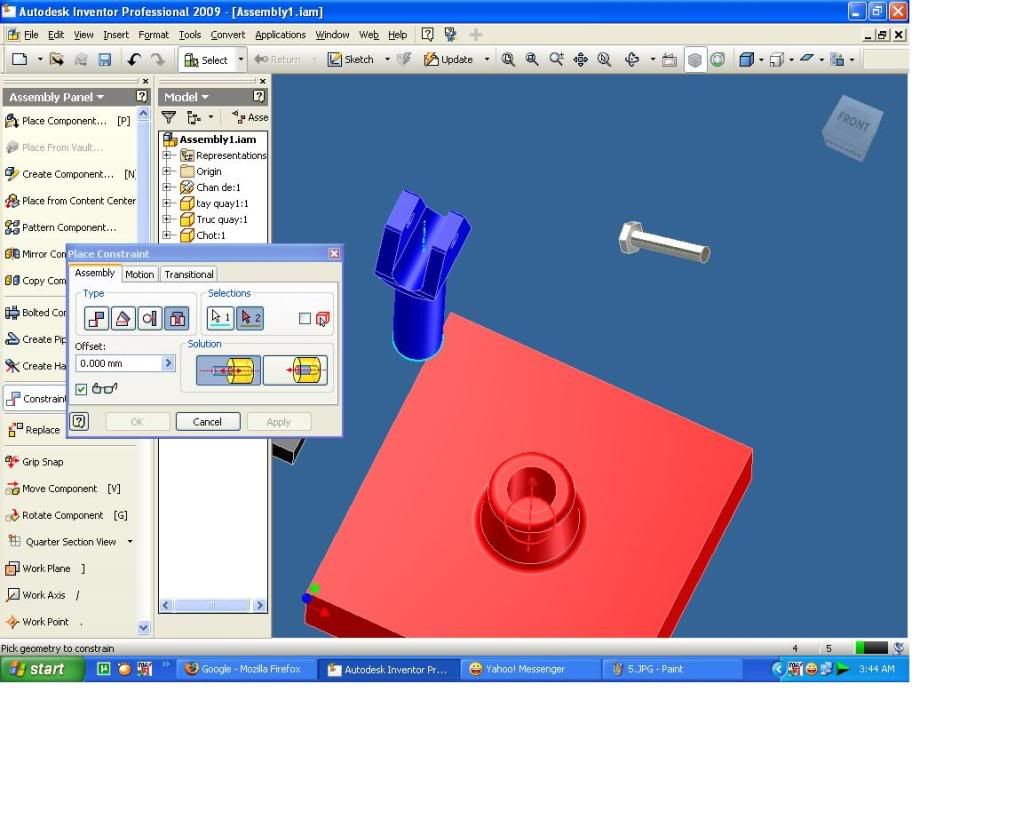
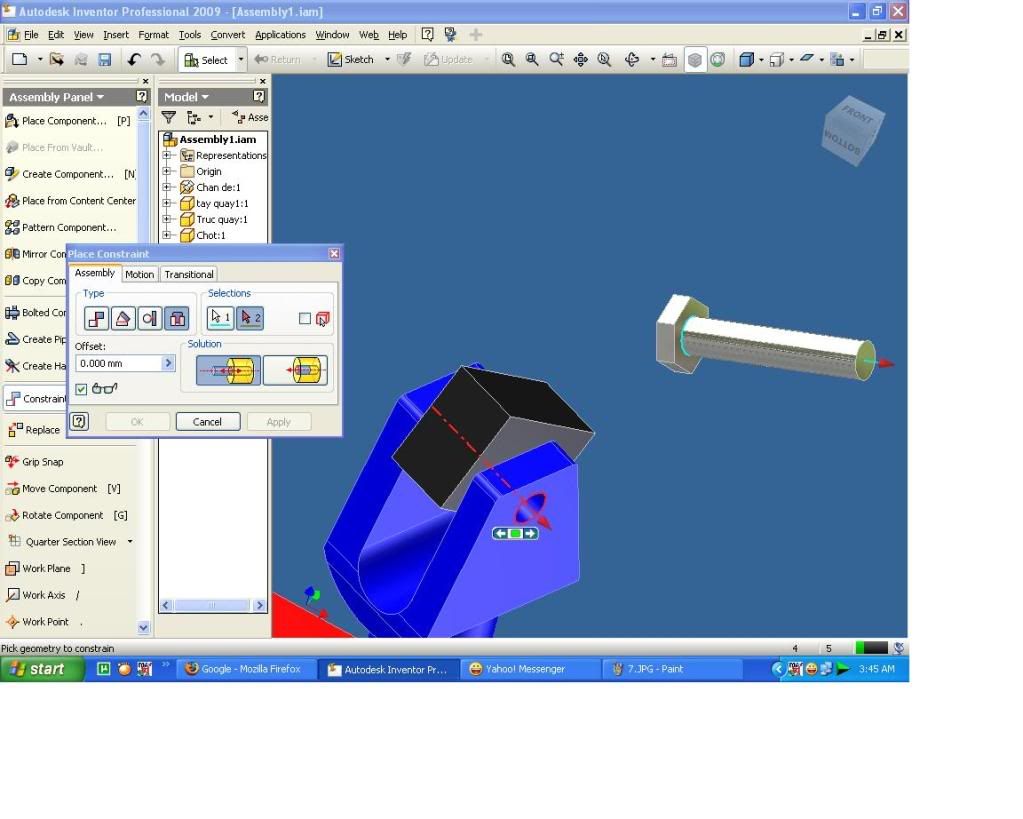
Tiến hành Mate: Mate Insert giữa chân đế và trục quay.
Mate giữa trục quay và tay quay:
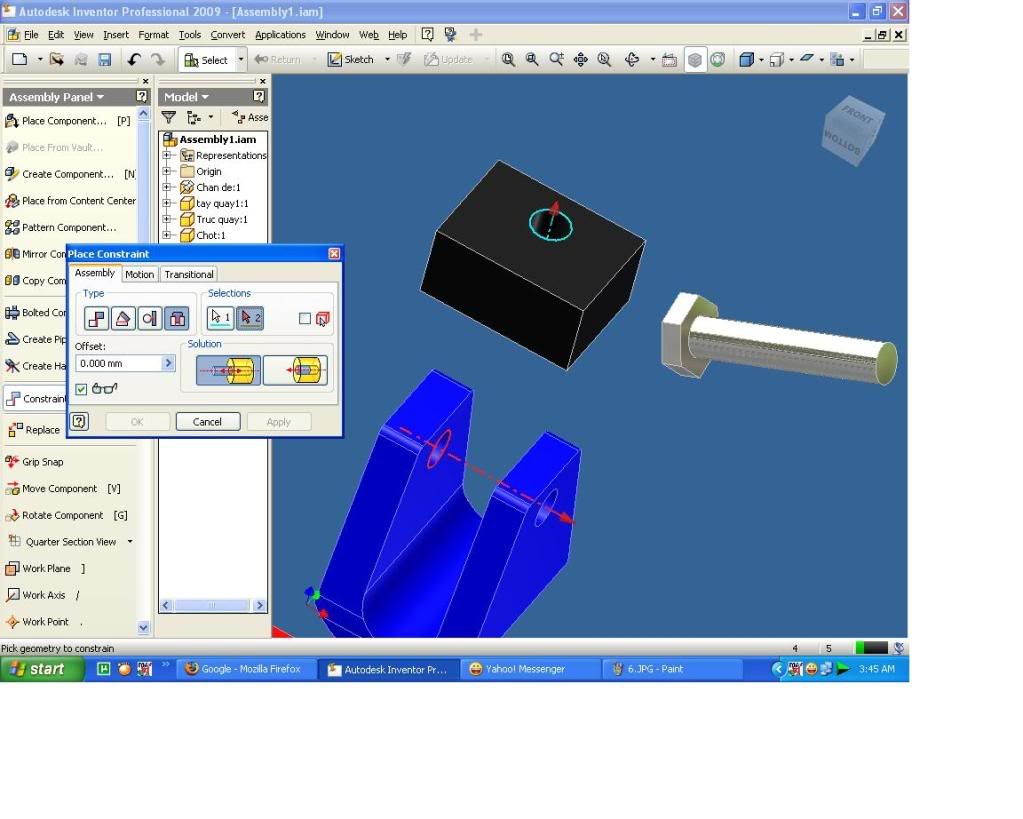
Mate chốt:
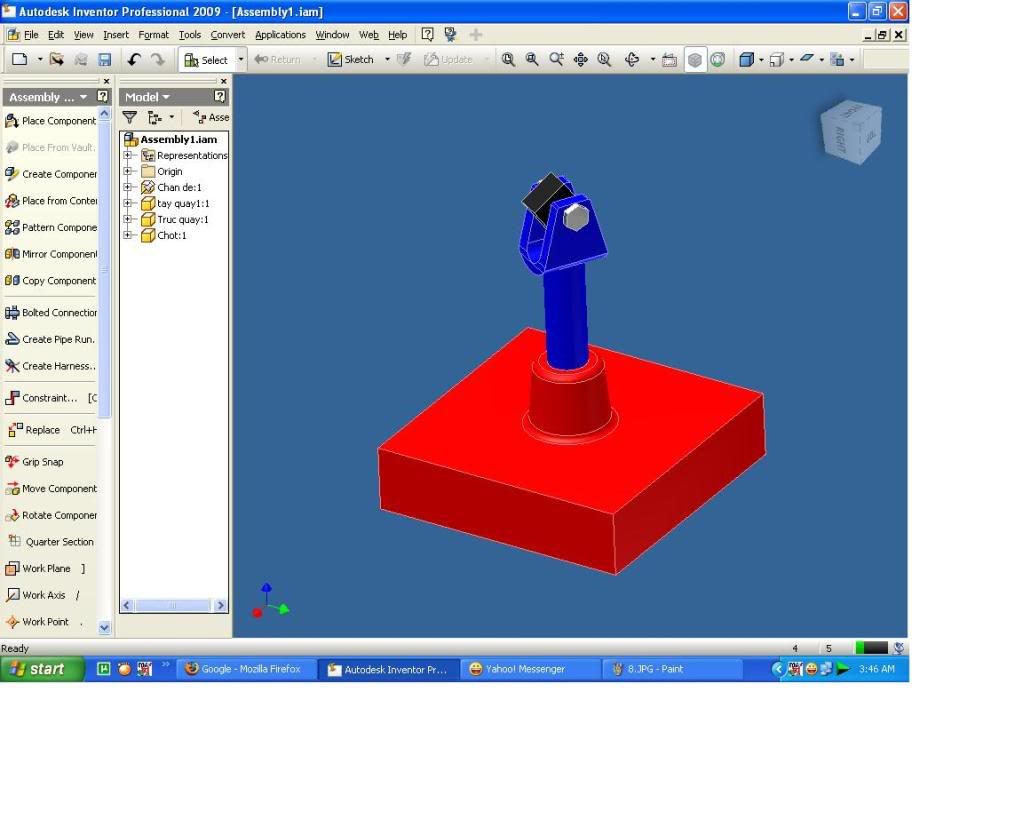
Thế là dc một bản assembly như hình sau:
Chuyển sang môi trường Dynamic simulation :
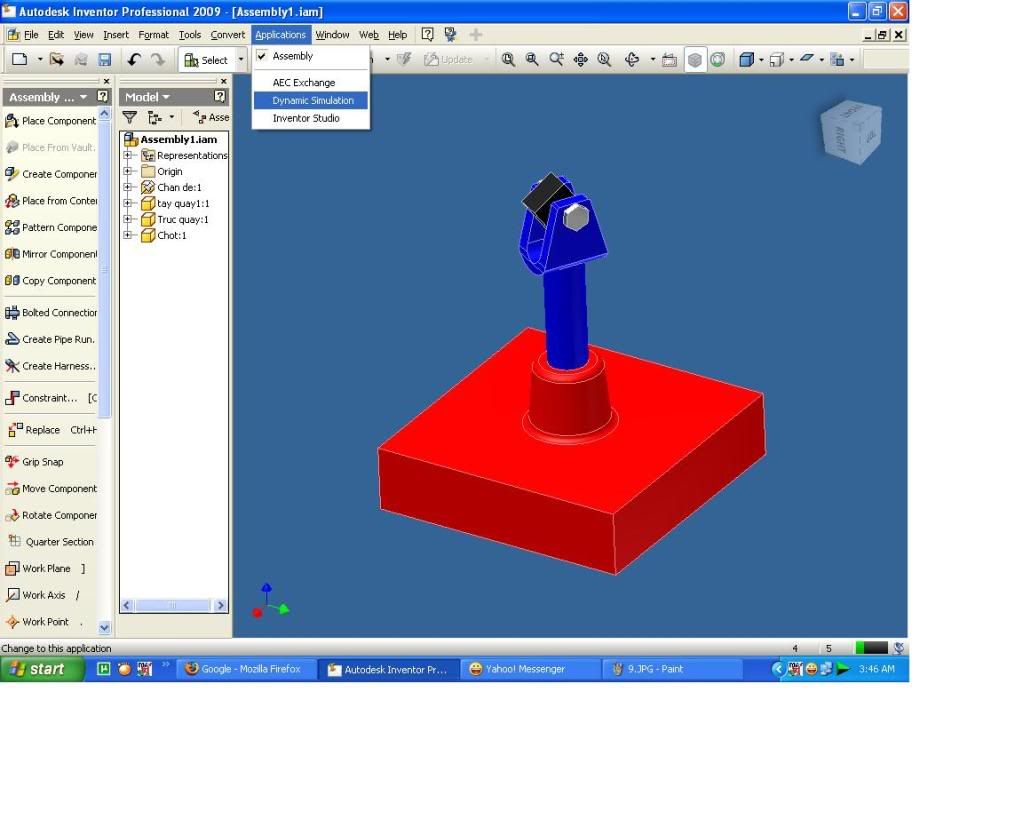
Giao diện Dynamic Simulation :
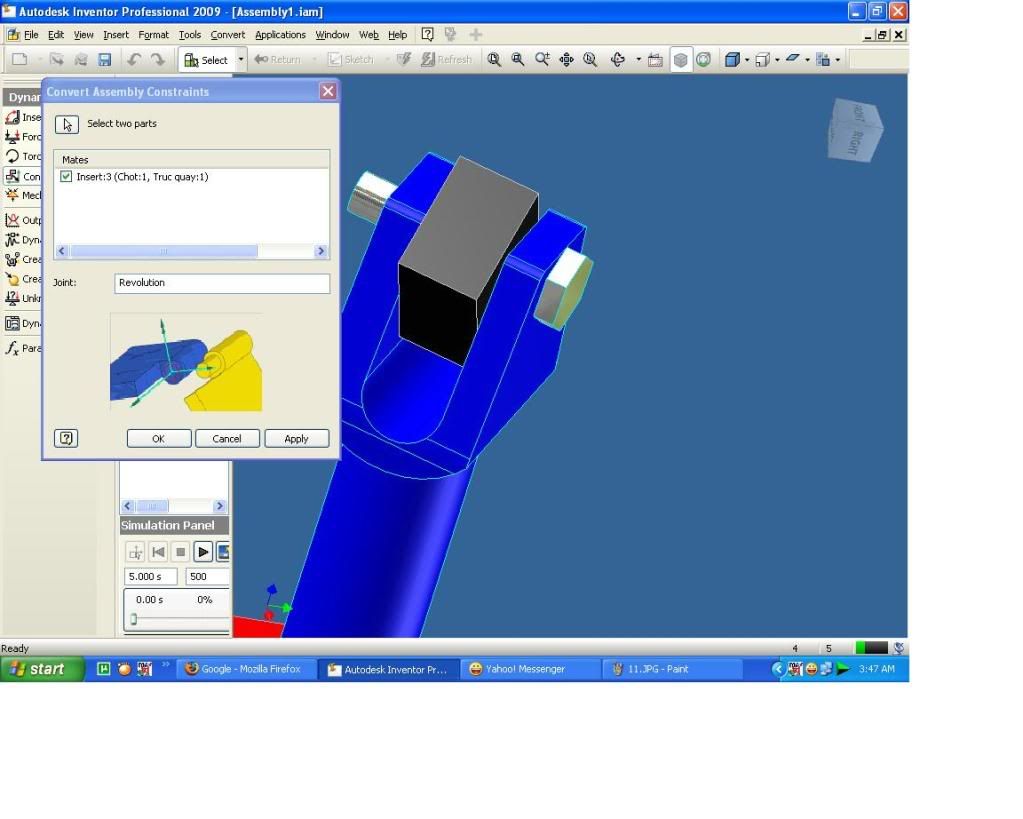
Tiến hành Convert Mate:
1 Mate Insert = khớp Revolution.
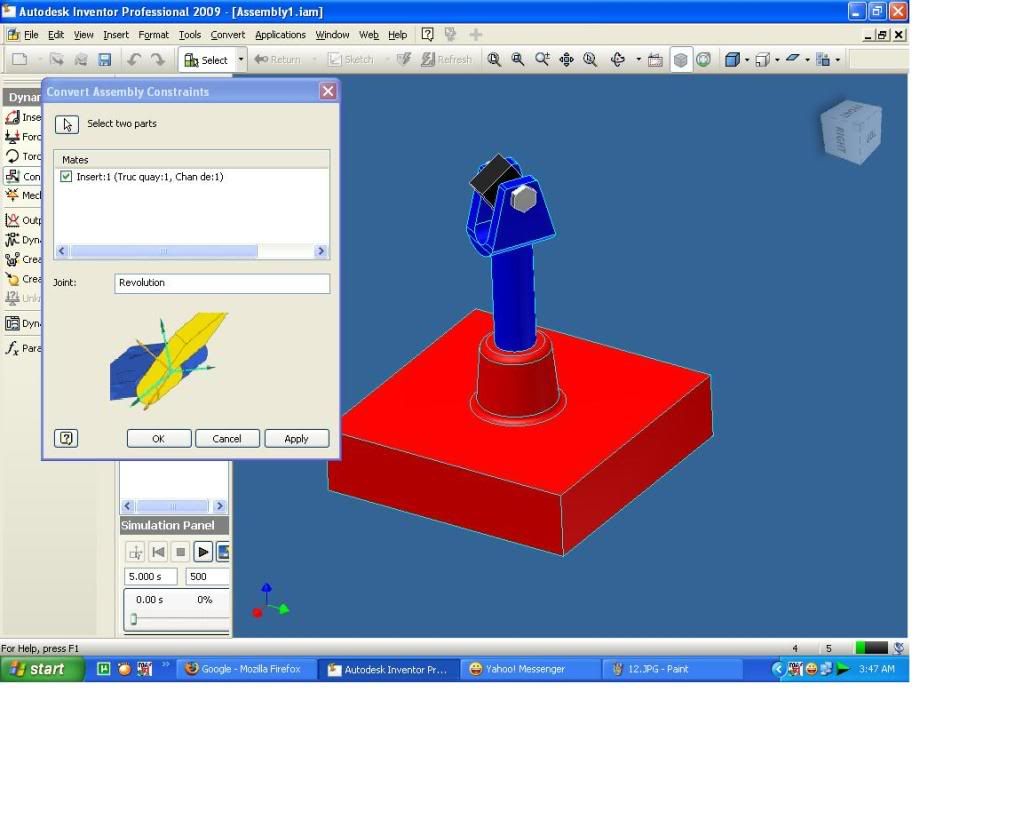
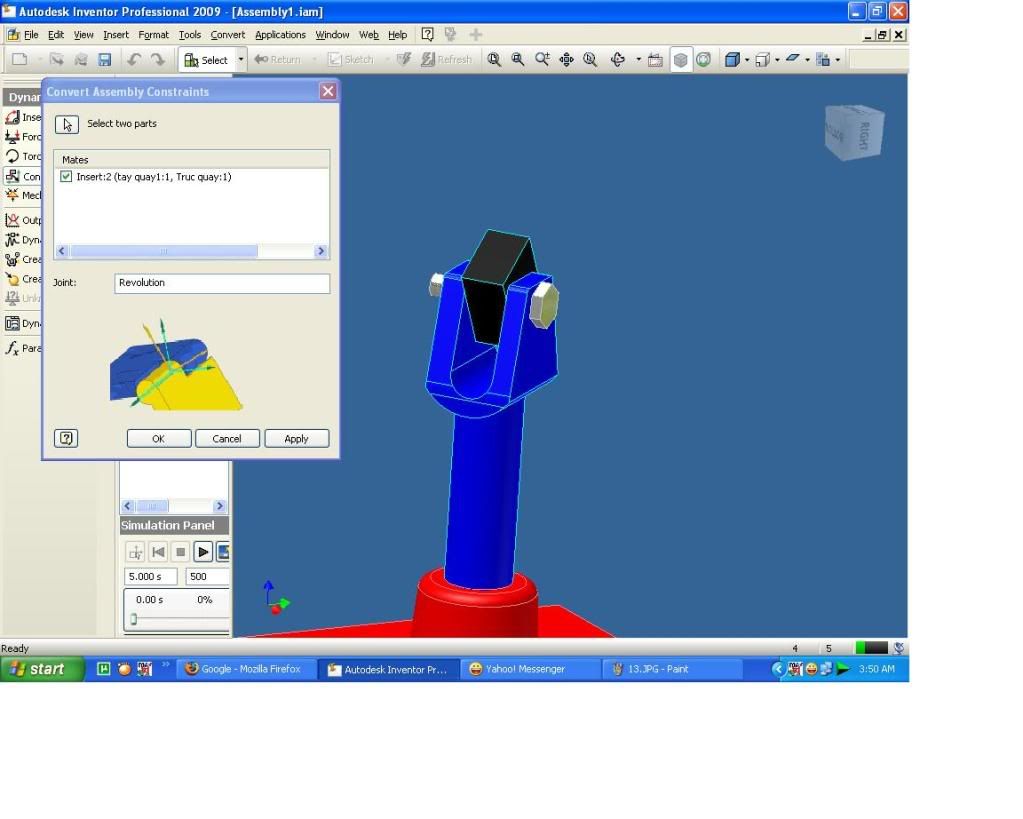
Tương tự ta có.
Làm tương tự với chốt:
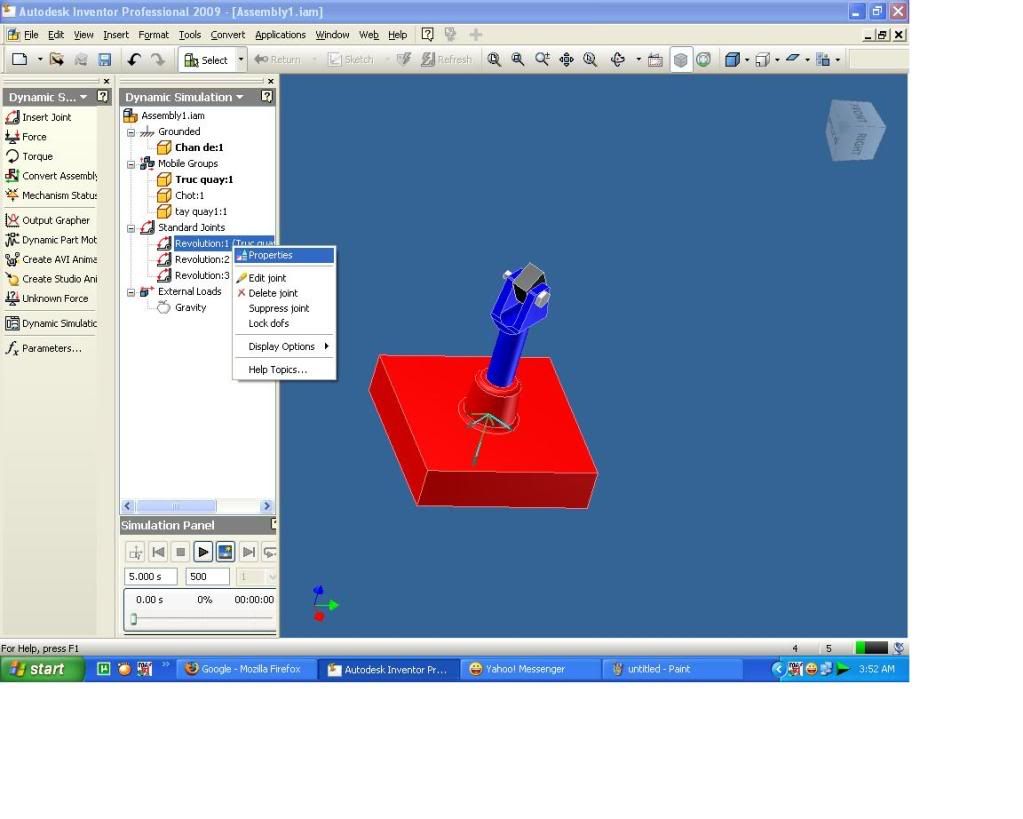
Sau khi tạo khớp xong chúng ta có thể làm các điều kiện chuyển động.
Click chuột phải vào Revolution 1 chọn Property.
Chọn DOF :
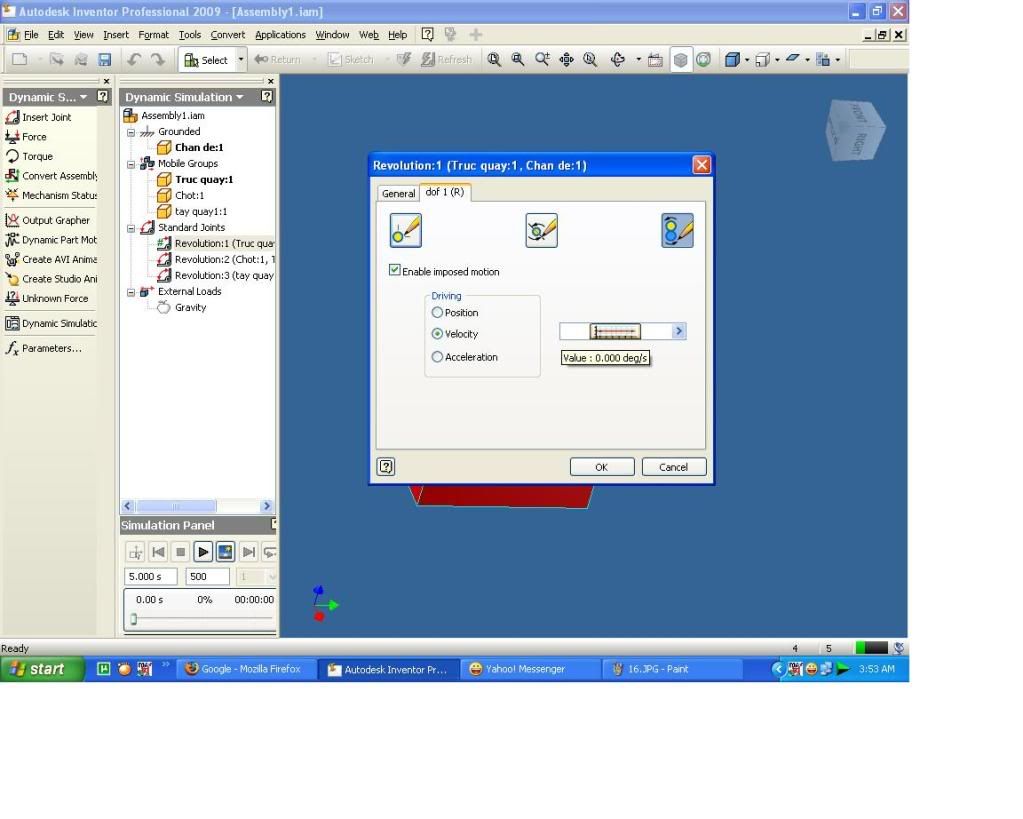
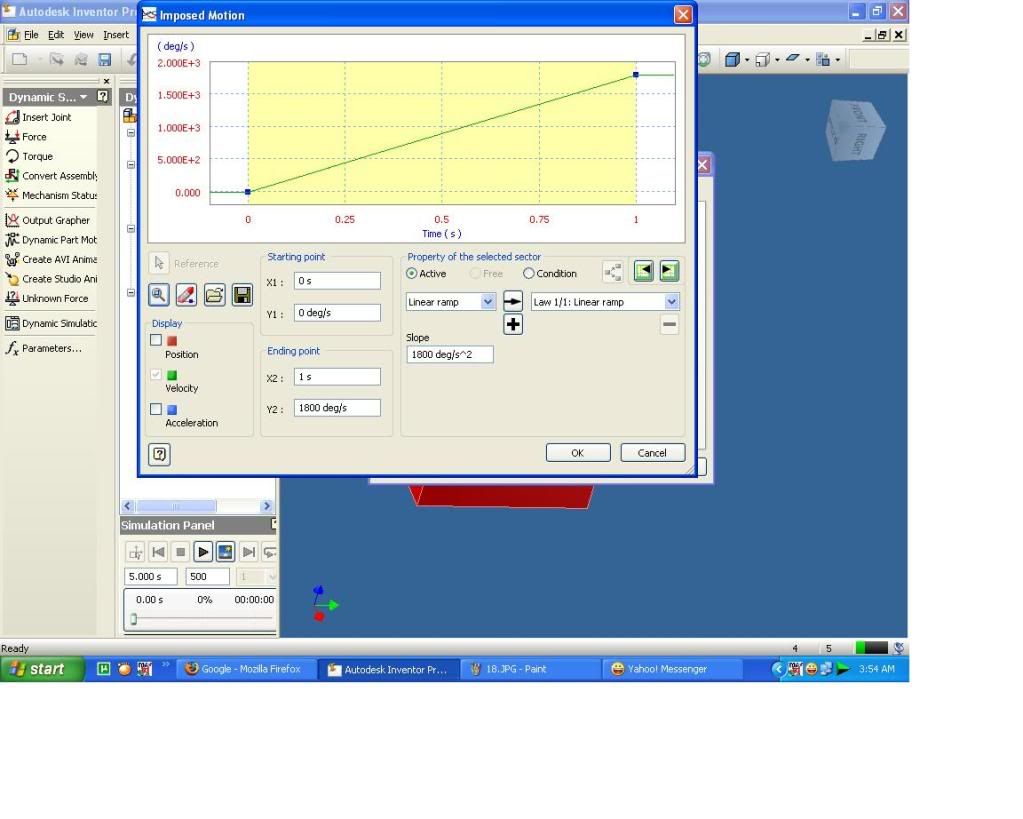
Chọn thông số vận tốc của chi tiết quay :
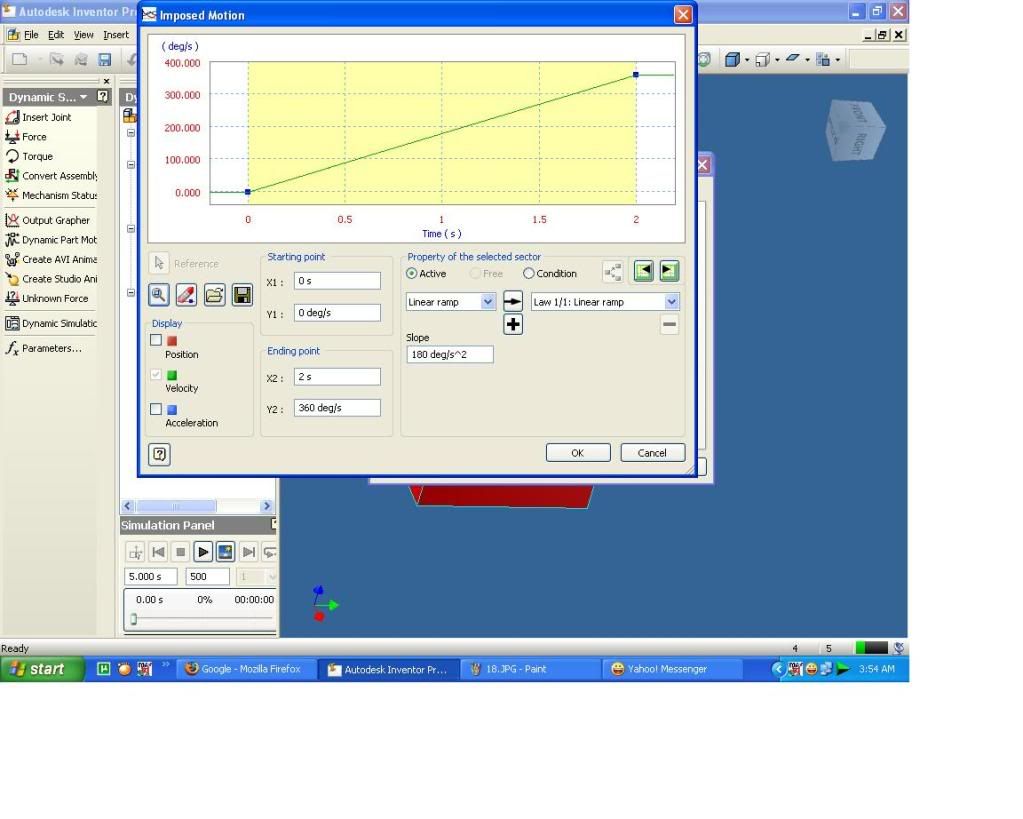
Làm tương tự với chi tiết còn lại:
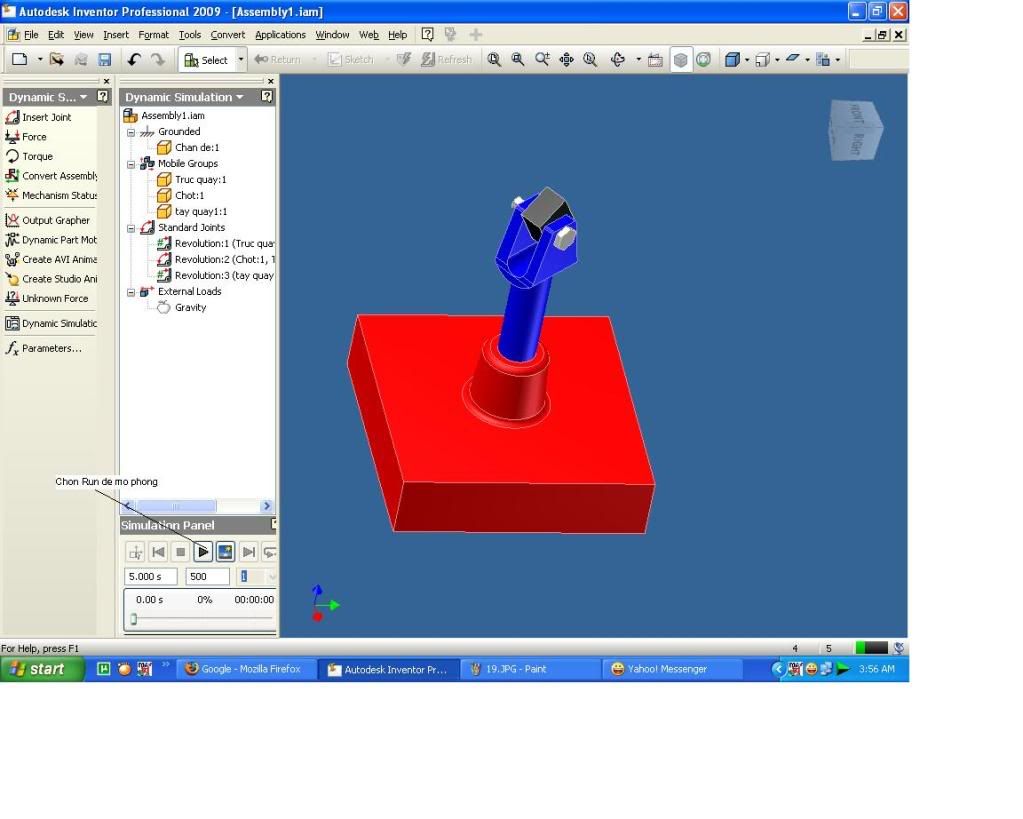
Chọn Run để mô phỏng
Đây là video hướng dẫn mình ghi lại:
Và Video kết quả :
.
Chúc Các bạn thành công!
Nguồn: hauionline.com









0 nhận xét:
Đăng nhận xét